近日,特斯拉新款 Model3 宣布配置 4D 毫米波雷达,实现行业 0-1。作为国内领先的毫米波雷达感知服务提供商,西部证券在《对话掌门人系列》中对楚航科技创始人兼 CEO 楚詠焱先生进行了专访,访谈中,楚詠焱表示楚航科技 4D 成像毫米波雷达已经获得国内某主流车企定点,并将于 2023 年底实现规模化量产。

在自动驾驶领域,随着汽车电动化、智能化的普及与渗透,毫米波雷达作为智能驾驶传感器中必不可少的一员,与摄像头和激光雷达相比,它能在任何条件下工作,甚至在雾、暴雨、漆黑及空气污染等各种恶劣天气和环境条件下也能提供最高可靠性的探测。除了全天候特性,毫米波雷达在测距测速方面的准确度也远高于视觉系统,安全性与可靠性更高,是自动驾驶感知系统中无法取代的存在。
而基于传统低分辨毫米波雷达升级的高分辨率 4D 毫米波雷达,能在低成本要求下,替代传统雷达更好地提升环境描绘,适应摄像头和激光雷达以光学为基础的自动驾驶主传感器数据呈现并增强系统点云前融合的鲁棒性,更好地帮助 L3 及以上级自动驾驶系统实现感知冗余以及与摄像头的融合感知。
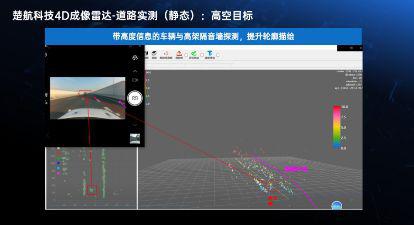
4D 毫米波雷达应用场景十分广泛。在单车智能方面,其具备安全冗余方案和低线束激光雷达替代方案两大需求趋势,可以满足 L2+/L3 自动驾驶系统感知需求以及作为多传感器融合方案的一部分,与摄像头融合实现感知 ; 在车路协同方面,通过多传感器融合方案,可以将其点云与摄像头图像融合协作,检测前方物体的垂直高度以及静止和横向移动物体,检测、跟踪车辆、行人等目标信息,对智慧交通提供信息支持和功能实现。
又因为 4D 毫米波雷达是基于传统 3D 毫米波雷达之上性能更佳的一款感知产品。所以一款成熟的 4D 雷达,它的开发周期必须要经过传统毫米波雷达的研发路径,在经历过产品可靠性、车辆功能安全验证以及大量的路测数据验证后,才能进行规模化量产落地。拥有丰富的车规级毫米波雷达研发技术和量产经验,是实现 4D 雷达量产落地的必要条件,这是一条不可跨越的研发道路,也是智能驾驶感知商业化落地需要遵循的客观发展规律。
目前,4D 雷达的技术发展路径正在从带目标俯仰信息的 ADAS-4D 目标雷达向带点云俯仰信息的 AD-4D 点云成像雷达升级,前者的设计宗旨是利用最少的点云生成最稳定的目标,以支持 L0-L2 场景,主要与传统的分布式 EE 架构和优化的域控架构组合。后者则要求利用更强大的硬件和软件算法生成更多高质量点云,以满足 L3 以上场景和中央集中式架构发展方向的需求。
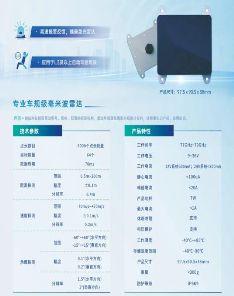
楚航科技,现推出的 4D 成像毫米波雷达,采用了芯片级联方案来实现水平和垂直方向上的高分辨率。这种多芯片级联后的多发多收增加物理孔径,较基于算法的虚拟孔径方案置信度更高,符合车载应用对安全等级的要求,也降低了后端复杂处理对算力的依赖和对实时性的影响。该方案还具备一定的灵活性,可以根据实际需求调整级联芯片的数量,甚至是芯片的选型,以达到期望的效果。

楚航科技该款 4D 成像毫米波雷达产品,目前具备多项国际先进技术,包括产品性能上满足 HWP 及 TJA 功能对毫米波传感器的要求,在系统架构中定义多片毫米波雷达芯片 MMIC 的级联架构设计,多片毫米波雷达芯片 MMIC 的级联在系统架构层面的实现以及毫米波雷达点云功能的实现等。
去年底,楚航科技也与国内某知名车企成功完成 4D 毫米波雷达软件开发合作,并取得了实质性突破。其中在点云输出的算法处理上,楚航科技现已做到了在域控上的软硬件解耦。该款 4D 雷达产品还将持续创新升级,通过提供 4D 雷达点云质量的输出分析,再结合主机厂需求,从芯片级联、到信号处理和算法输出点云的数据参数处理上进行硬件定制。



还没有评论,来说两句吧...